 2898
2898
编者按:作者 中寰卫星汽车智能总监 黄亮 ,36氪经授权发布。
2020年3月中旬,一篇关于“著名车企关闭L3研发”的文章出现在了我的朋友圈里。自从2019年以来,自动驾驶行业就如溃堤般一路下行,好不容易到了年底传出几家大名鼎鼎的自动驾驶初创公司融资成功的利好消息,身处武汉,在新冠病毒就快要被战胜的时刻,并且正准备全面复工呢,看到这标题也确实被惊到了一下。
但是,细细品味这篇文章后,发现实际情况是,奥迪关闭L3,转而把人员投入到L2和L4的研发上,按照文章说法这里面有技术,有法律的问题,而我觉得更有L3产品能否被用户接受继而产品变现的现实问题。按照目前L3的通俗定义是,在限定条件下,也就是依靠车辆自身能感知,能可靠运行时,由车辆替代驾驶员来驾驶,那么在限定条件以外仍然是驾驶员来驾驶,那么在产品的设计上就非常不方便,因为车辆自身感知的可靠环境切换往往非常快,甚至可以说非常频繁,比如出现修路的情况,这个时候驾驶员怎么从驾驶走神的状态回复到能接管车辆就是很大的问题,甚至可以说非常的反人性了。而如果关注L2和L4就不存在这种问题。
L2全部由驾驶员负责,车辆只是辅助,而暂且不谈L4什么时候能可靠的量产上市,至少在驾驶过程中,不存在需要驾驶员和车辆驾驶的来回切换问题。从驾驶的可用性来说,L2和L4都是远超L3的可行方案。
而放弃L3,转向L2和L4,从技术和产品的发展角度来说,这是自动驾驶做为新技术趋向于成熟量产的一个理性过程,大家由单纯的对技术的渴望和狂热,变为更加脚踏实地的去考虑落地场景,继而将浮在天上的技术转化成真实的产品。Gartner曲线(成熟度曲线)完美的诠释了这一发展过程。
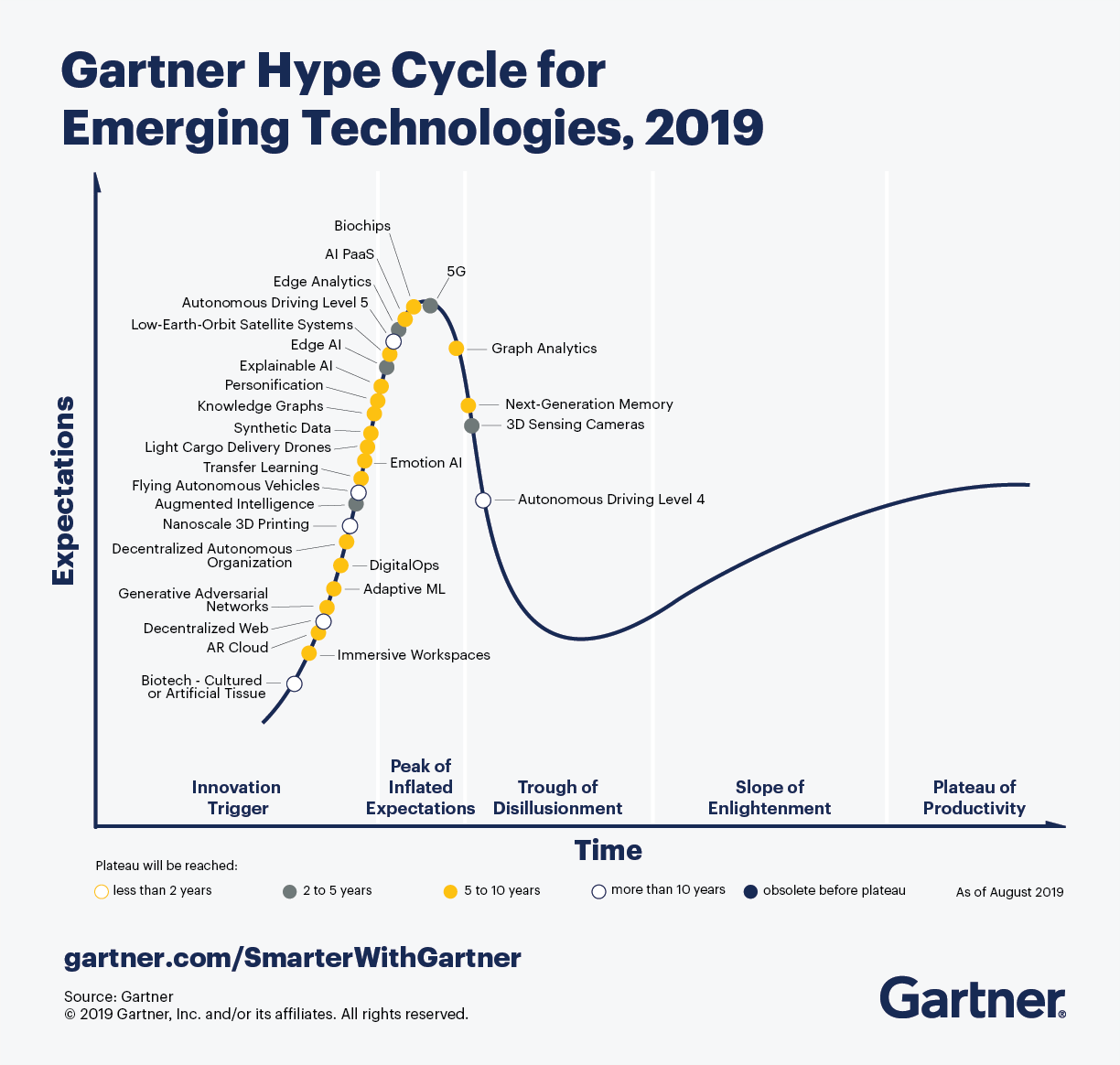
图1. 2019 Gartner曲线,图片来源于网络
这是一条描述新技术产生后社会预期随时间变化的曲线,它能呈现新技术的市场热度和现实发展的偏离程度
从图中可以看到L4自动驾驶的热度正在急剧下降,并且预计需要10年以上的时间才能实现。而L3甚至都没有画上,如果有,无疑在比L4更靠近底部的位置上。而L2则必然是在量产的阶段了。
L4还有待时日,现在L3又被放弃,我们该做什么呢?毫无疑问,目标就是L2了,其实在汽车产业中早已经有两个标杆性的产品了,就是Telsa的AutoPilot和通用卡迪拉克CT6的SuperCruise了,在行业内也早已经形成共识,把他们定义为L2.5甚至L2.9,叫法的不同,而实际上都是L2的产品,做为吃螃蟹的代表他们已经取得了不小的成就,国内车企也纷纷把他们做为代表性的对标产品。我本人一直就是L2的推崇者,并且一直在努力这方面的产品。
而其他更多的L2产品则是以自适应巡航(ACC)和车道保持(LKA)为代表了,虽然这类的L2产品已经实现了部分的量产,但是我觉得这些产品还有很大的进步空间。比如车辆在急弯,连续上下坡,陡坡,这些路段开启该功能仍然是十分不稳定或者不可靠的。
比如,在视频”Tesla Autopilot vs. Cadillac Super Cruise“的11:45秒的时候,Tesla在经历一段上下起伏的路段时,车辆会明显偏离道路,这是由于车辆在起伏道路上仰角发生了变化,相机的姿态发生了改变继而检测的车道线就不稳定了,于是就直接影响到了车辆的横向控制,这是极易引起不必要的车辆事故。

图2,可以看到前方道路是先下坡继而马上上坡,因为车辆偏离道路,驾驶员进行了干预
类似的,因为路面车道线的不清晰,甚至是车道线的错误,从而引起的Tesla的事故更是屡见不鲜。
如果能预知车辆所在的路面情况,通过算法加以修正,那么无疑是对目前的车道保持的极大提升。
同样在自适应巡航方面,如果车辆遇到连续上坡,或者连续下坡,表现也是非常不尽人意,车辆很容易速度控制的不够稳定,或者表现出危险的驾驶情况,如果在这个基础上在遇上弯道,往往也一定会遇到弯道,这时即使是驾驶员负责着也会显得更加的恐怖,不论是大卡车还是小轿车都会面临这样的问题,而尤其以卡车的影响更为巨大,比如去年兰州17Km的长下坡事故。
最后当然就是城市内的各种路口和高速公路上的匝道,如果都能提前预知,车辆提前做一些相关的控制,该变道的就要提示变道了,该减速的就该减速了。
那么现状如何呢,其实以上的情况,使用车上现有的传感器显然是不行的,要么是感知不到,要么就算是感知到,就比如图2这样,已经在坡上了。但是在不改变现在车辆设备的情况下,使用一般量产的定位设备,在加入地图软件,就可以近乎完美的解决。因为我们只要告知车辆前方大致什么类型的路况即可。
实际上做为图商,我们有全部的路网和路型,完全可以在使用的时候,先通过数学算法,将道路的情况做好精确的分类,定义好急弯,连续上下坡的,预告好前面路的情况。剩下的就是大家使用一套通用的规则来获取这些路的情况和分类罢了,这也是地图做为传感器的精髓所在。
- 未添加任何数据~~
