 2898
2898
近日,苹果公司发表了一篇新的人工智能论文,号称找到了弥补目前自动驾驶汽车中,光学雷达传感器(LIDAR,light detection and ranging)测绘技术不足的办法。
论文中介绍的系统被称为VoxelNet,它能够把光学雷达传感器收集的原始数据转化成3D测绘图,还能在测绘图中辨识出包括汽车、自行车和行人等在内的物体,让驾驶更安全。
TheVerge在11月22日的报道中介绍,光学雷达传感器被认为是自动驾驶系统的眼睛,它通过向四周物体发射激光,从而对周围的环境进行3D建模。这种方法比一般的照相摄像头能包含更多深度信息,却只能创造出小片的测绘图,这导致只要有物体挡住激光,就无法看到更大区域的图像,这个缺陷令它不适合安全自动驾驶。
为了解决这个问题,以往工程师的做法是,使用多个独立系统,首先将3D光学雷达传感器数据划分成多个有用区域,然后分辨各区域中都是什么。苹果的VoxelNet系统则将以上这些流程全部并入一个神经网络,令系统处理更加高效。苹果的论文中称,与多个竞争对手的系统表现相比,自己系统的表现可以轻松胜出。
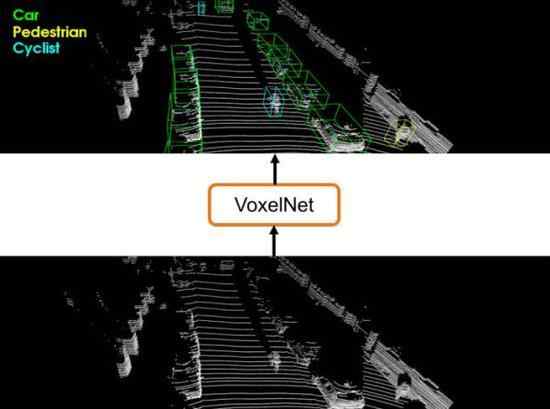
VoxelNet处理生成的3D测绘图像中,能够分辨出行人、自行车和汽车等物体。如图所示,黄框中是行人、蓝框中是自行车、绿框中是汽车。
这种系统除了可以广泛应用于自动驾驶汽车,还能应用于管家机器人、AR、VR等多种人工智能设备。
据彭博社2016年10月的报道,苹果公司曾经试图研发过自己的自动驾驶汽车,代号Titan。但随后更改了自己的目标,不研发自动驾驶汽车,只研发自治系统(autonomous systems),这样可以用自己的软件系统和汽车制造商合作。2017年6月,苹果公司CEO蒂姆·库克在接受彭博社采访时,确认了苹果正在研发自治系统的消息。
库克在访问中称,“我们把自治系统看作是所有人工智能应用之母,它可能是我们正在研发的最难的人工智能项目之一。”他还补充道,“我们把它看作是至关重要的核心技术。”
不过,苹果的这项新系统在有的自动驾驶工程师看来,并不算是特别重大的突破。The Verge采访了自动驾驶视觉系统专家、荷兰工程师Roland Meertens。Meertens介绍,为了绕过光学雷达传感器的缺陷,其他公司也在研发不同方法:“比如特斯拉,就根本不使用光学雷达传感器,但特斯拉的汽车非常擅长沿着车道行驶。”
2898站长资源平台站长工具:http://www.2898.com/webtool.htm
- 未添加任何数据~~
